The conic sections¶
The aim of the lesson is to show the correlation between IT (programming) and various branches of mathematics, i.e. mathematical analysis and geometry and some themes of physics i.e. velocity. Additionally, in classes with an extension in mathematics, we could try to show applications of derivatives.
Prerequisite
What students should know before:
Basic information about circles.
Time constraints:
starting from 90 min + 90 min
Preparing For This Tutorial:
The LEGO Robot that coincides with this tutorial comes from building specific sections found in the LEGO® MINDSTORMS® Education EV3
Core Set building instructions. You will need to build the main body for the robot, adapted to draw with some pen (see photo below).
Effects¶
Mathematics - After this lesson, students should better understand the topics related to conic sections: the circle and the ellipse. In addition, we give him the opportunity to compare the Cartesian and polar coordinate systems.
Computer science - This lesson will show students how to create a program that will make the robot plot an ellipse and give them an idea of how to plot other conic sections.
Exercise¶
Create a program that will cause the robot to plot an ellipse to be determined by \(\frac{x^{2}}{25} + \frac{y^{2}}{9} = 1\).
Plot an ellipse: \(\frac{x^{2}}{16} + \frac{y^{2}}{49} = 1\).
Plot a circle with a given radius.
How large must the radius of the inner circle be to have a right wheel three times the speed of a left wheel?
Example solution¶
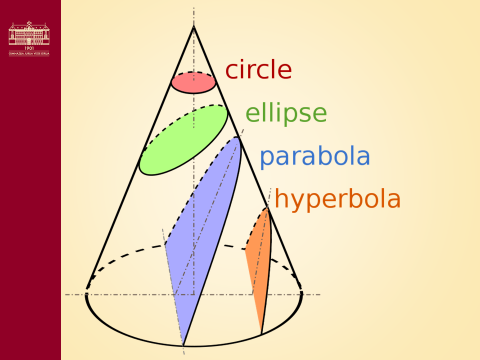
Cones are curves formed at the intersection of two infinitely large cones with a common vertex, an axis and a plane. E.g. a hyperbola occurs when a plane intersects both cones, a circle arises when a plane is perpendicular to the axis of the cone.
Let’s investigate an ellipse.
An ellipse is a plane curve surrounding two focal points (denoted by F1, F2), such that for all points on the curve, the sum of the two distances to the focal points is a constant (|F1P|+|F2P|=const). As such, it generalizes a circle, which is the special type of ellipse in which the two focal points are the same point (F1=F2).
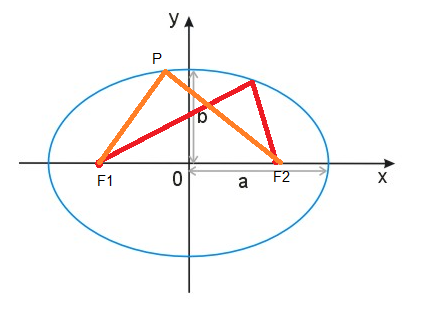
The equation of a standard ellipse centered at the origin with width 2a and height 2b is:
\(\frac{x^{2}}{a^{2}} + \frac{y^{2}}{b^{2}} = 1\)
Assuming a ≥ b, the focal points are (±*c*, 0) for \(c = \sqrt{a^2-b^2}\).
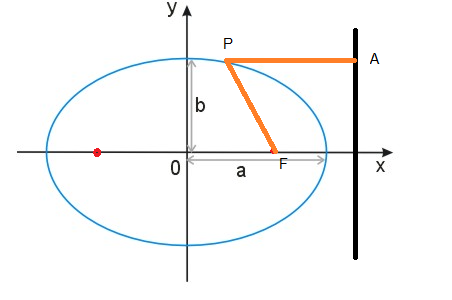
An ellipse may also be defined in terms of one focal point and a line outside the ellipse called the directrix: for all points on the ellipse, the ratio between the distance to the focus and the distance to the directrix is a constant:
\(e = \frac{c}{a} = (\frac{|PF|}{|PA|})\) numerical eccentricity
To plot ellipses we will use polar coordinates.
In polar coordinates, with the origin at one focus, with the angular coordinate measured from the major axis the ellipse’s equation is
\(r(\theta) = \frac{a(1 - e^{2})}{1 \pm \text{e cos }\theta}\) It could be also writing as
\(r(\theta) = \frac{p}{1 - \varepsilon \bullet cos\theta}\), where
p is the ordinate of the point above the focus F(c,p)
\(\varepsilon = \frac{e}{a}\) numerical eccentricity (for ellipse \(\varepsilon < 1\)- for circle \(\varepsilon = 1\) )
Part 1¶
First method-polar coordinate system
Ellipse:
\(\frac{x^{2}}{25} + \frac{y^{2}}{9} = 1\); a=5, b=3, e=4, p=9/5
\(r(\theta) = \frac{\frac{9}{5}}{1 - \frac{4}{5} \bullet cos\theta}\);\(0{^\circ} \leq \theta < 360{^\circ}\)
Python program for plotting ellipsis
#!/usr/bin/env python3
from ev3dev2.motor import LargeMotor,MediumMotor, OUTPUT_D, OUTPUT_B,OUTPUT_C, SpeedPercent, MoveTank
import math #v prvih dveh vrsticah naložimo potrebne knjižnice
tank= MoveTank(OUTPUT_B, OUTPUT_C) #ustvarimo objekt za krmiljenje velikih motorjev B in C
mm=MediumMotor(OUTPUT_D) #ustvarimo objekt za srednji motor (spust in dvig flumastra)
steps=20 #število točk/korakov
treesixty=2,105 #rotacija potrebna za 360deg
lista=[5.6,3.6,2.3,1.6,1.2,1,0.9,0.85,0.82,0.78,0.78,0.82,0.85,0.9,1,1.2,1.6,2.3,3.6,5.6] #lista, v kateri so shranjene zračunane razdalje, pretvorjene v število rotacij
for i in range(steps): #zanko ponovimo 20x
tank.on_for_rotations(35,35,lista[i]) #se pomakne iz gorišča za razdaljo shranjeno v listi
mm.on_for_rotations(5,0.15) #spustimo flumaster
mm.on_for_rotations(-5,0.15) #dvignemo flumaster
tank.on_for_rotations(-35,-35,lista[i]) #se vrne nazaj v gorišče
tank.on_for_rotations(-5,5,treesixty/steps) #zarotira za kot (v našem primeru za dvajsetino od 360deg)
Part 2¶
Second method- physical approach
Exercise. Plot a circle with a given radius.
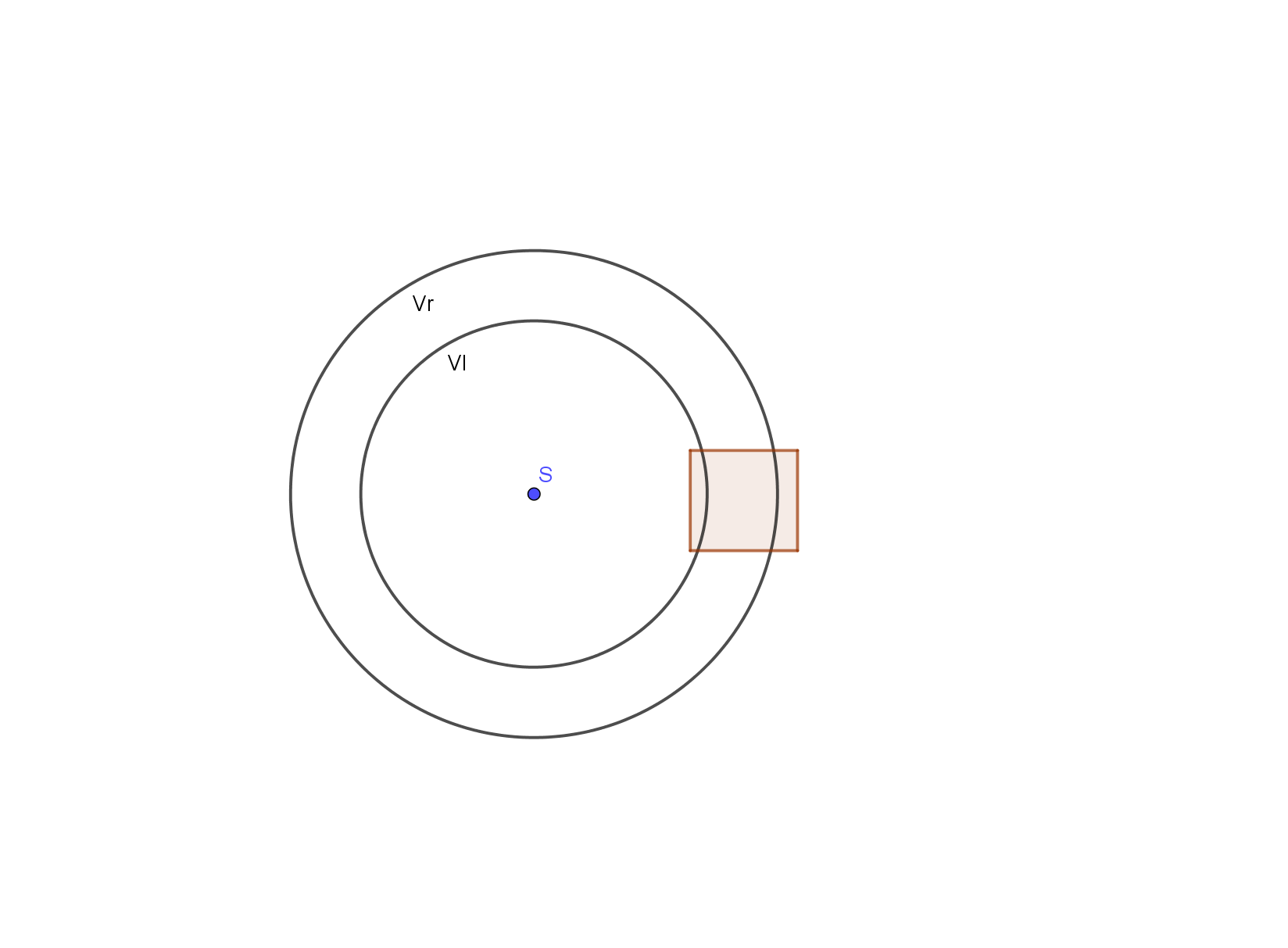
A Circle can be plotted simpler with the help of physics. The left and the right wheels of the robot make different circles at the same time, since the distance between the left and the right wheels is 12 cm. The robot will make a circle with an internal radius of 50 cm in 10 seconds. We will use the following formulas:
\(o_{l} = 2\pi r o_{r} = 2\pi\left( r + 12 \right)\)
\(v = \frac{s}{t}\text{ }v_{l} = \frac{2\pi \bullet 50}{10}\), \(v_{r} = \frac{2\pi \bullet 62}{10}\)
Python program for plotting circle
#!/usr/bin/env python3
from ev3dev2.motor import LargeMotor OUTPUT_D, OUTPUT_B,OUTPUT_C, SpeedPercent, MoveTank
import math #v prvih dveh vrsticah naložimo potrebne knjižnice
tank= MoveTank(OUTPUT_B, OUTPUT_C) #ustvarimo objekt za krmiljenje velikih motorjev B in C
v1=30 #hitrost notranjega kolesa
r1=100 #radij notranjega kolesa
r2=r1+12 #radij zunanjega kolesa
v2=v1*r2/r1 #zračunamo hitrost zunanjega kolesa
tank_drive.on(v1,v2) #poženemo kolesa s hitrostima v1 in v2
|https://ssl.gstatic.com/ui/v1/icons/mail/images/cleardot.gif|
Part 3¶
Ellipse
The parametric ellipse equations are
\(x = a \bullet cost,\ \ y = b \bullet \text{sint}\)
With derivative we get velocities (4th grade)
\(v_{x} = - a \bullet sint,\ \ v_{y} = b \bullet \text{cost.}\)
The total speed on one wheel is
\(v =\sqrt{v_x^2 + v_y^2}\)
We also determine the speed for the outer wheel. The distance between the wheels is 12 cm.